Publication Information
Frequency: Continuous
Format: PDF and HTML
Versions: Online (Open Access)
Year first Published: 2019
Language: English
| Journal Menu |
| Editorial Board |
| Reviewer Board |
| Articles |
| Open Access |
| Special Issue Proposals |
| Guidelines for Authors |
| Guidelines for Editors |
| Guidelines for Reviewers |
| Membership |
| Fee and Guidelines |
 |
From Environmental Robots to Cyber Creatures: A Liberal Prospection on the Future Agroecological Systems
Pilar Barreiro1*, Richard J. Duro2
1LPF_TAGRALIA, Universidad Politécnica de Madrid, Spain
2GII, CITIC (Centre for Information and Communications Technology Research), Universidade da Coruña, Spain
Received Date: January 20, 2020; Accepted Date: January 30, 2020; Published Date: February 06, 2020
*Corresponding author: Pilar Barreiro, Universidad Politécnica de Madrid, Spain. Email: pilar.barreiro@upm.es
Citation: Barreiro P, Duro RJ. (2020) From Environmental Robots to Cyber Creatures: A Liberal Prospection on the Future Agroecological Systems. Adv Agri Harti and Ento: AAHE-110
Abstract
This article presents a joint view of two senior academics from very distant domains: Intelligent Robotics and Agroforestry and Bio systems engineering. In this framework we outline the actual needs and forecast what may be considered a disruptive view of agricultural and environmental robotics, a natural evolution for some other scientists. We have written our views as a Decalogue, without pretentious aims but trying to convey some inspiring insight of what bio-sciences have to offer to different approaches to robotics: hard (H), soft (S) or even Living (L).
Antecedents
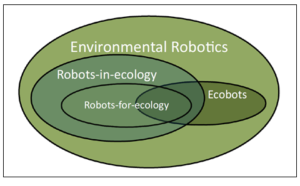
Let us start by defining the term environmental robotics as a part of the tech-science on robots dealing with unsupervised acting/reacting units introduced in an ecological system with or without a specific ecological function. Ecological Robots (Ecobots) adhere to the previous statement by incorporating energy harvesting capabilities from their surroundings so as to make them fully autonomous and potentially prepared for prolonged periods of isolated and unattended life, eventually beyond human existence.
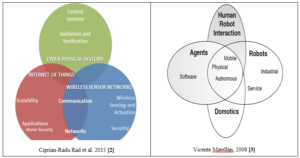
It seems also convenient to clarify the term cyber creatures. To do so, we shall refer to the concept of Cyber Physical Systems (CPS) which has been defined as smart systems that encompass computational (i.e., hardware and software) and physical components, that are seamlessly integrated and closely interacting to sense the changing state of the real world. CPS are the product of a trans disciplinary engineering design process–mechatronics–that integrates electronics, software, computers, and motor control (Suh et al., 2014) [1]. CPS involve a high degree of complexity at numerous spatial and temporal scales, as well as highly networked communications, integrating computational and physical components (Ciprian-Radu Rad et al. 2015) [2], see (Figure 2). According to this author we are currently witnessing the birth of a new field of knowledge led by the recent integration of CPS, internet of things (IoT) and wireless sensor networks. Somehow all of it will have to be addressed in this prospective article.
Considering the above-mentioned statements, the objective of this paper is to outline a Decalogue of details/specifications for the upcoming environmental robots and maybe their future offspring, which will be reviewed and materialized through iconic examples either from our own experience or in reference to other published works or technological data.
The cornerstone of environmental robots is perception and not necessarily action, reflecting the similarity in sensing/acting in humans, and other biological creatures.
When compared to our whole body reaction ability to external stimuli (escaping, approaching and manipulating), it is impressive how complex human perception can become through the integration of vision, hearing, olfactory and tactile sensing. A case in point is the affectivity of our stereo perception, which acts as a safeguard against sensing failures but also allows the 3D positioning and mapping of many stimuli. And yet we are ever increasing and improving it in many ways. Examples are the enhancement of spectral sensitivity (to sounds and electromagnetic wavelengths), or scene augmentation through lenses.
But there is more to this augmentation process, millennial and digital natives in general are accustomed to using a variety of augmented reality devices and tools, which are rare and unconventional to their parents, and unbelievable for previous generations of humans. Most of our young colleagues make extensive use of smart mobile phones with sensing capabilities that far exceed some human senses in a very cost effective way.
This opens up cost effective paths to the generation of CPS by installing one of such units in a robotic platform. Moreover, most of the so called utility vehicles come with a large number of electronic sensing units and sub-systems that can be readily acquired through Original Equipment Manufacturers (OEMs). Sub-systems that can be installed on new platforms by skilled operators at a reasonable time expenditure.

https://www.pinterest.ch/amp/pin/429812358158618467/
We can also find more sophisticated smart mobile units that include thermal cameras (FLIR or similar), NDVI mapping, or even volatile sensing (VOCs). For example, we can take the SENSIRION Digital Multipixel VOC Gas Sensor DFN6 as a standard multisensory MEMS (2.45 x 2.45 x 0.9 mm3), containing: T,RH, total VOCs (several metal-oxide based transducers) and CO2 sensors with an I2C port at less than 11 euro for a single unit.
(Figure 4) highlights some of the physical differences that we find between human RGB vision and that of insects (VBG) or birds (VRGB). This fact emphasizes the interest of rethinking or reprogramming the available mobile sensing technologies to augment our perception of real life.
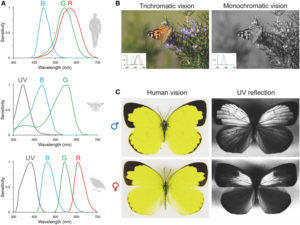
Chen, Stewart and Arikawa, 2018 [4].
Cyber creatures may also be incorporated to improve human decision making and the corresponding feedback into AI.
From the point of view of physiological studies, we value the implications of the variety in the perception abilities of other animal species like the thermal sensitivity of snakes, or the perception of ultrasounds in bats and dogs. While other organisms such as plants and fungus exhibit responses that are missed by humans due to their extremely slow rate, pointing towards the interest of the dynamic and temporal analysis of such behaviours. Therefore, to set-up an enhanced robotic intelligence, there is a need for crafting flexible holistic perception systems. Such demand should also be taking care of the feasibility of turning such devices into massively marketed low cost units so as to be able to install them in large unmanned fleets of either aerial, terrestrial or underwater vehicles.
In our collective imaginary, robots (H-robots) are compact, rigid solid machines, far from the delicacy of living organisms, though we have recently incorporated the term soft robotics as it’s opposite. In this context, soft Robotics is a specific subfield of robotics dealing with constructing robots from materials similar to those found in living organisms, drawing heavily from the way in which living organisms move and adapt to their surroundings. We would call these systems soft robots, or S-robots.
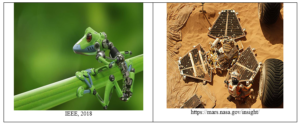
However, living organisms present many advantages over H- or S- robots for many purposes (think of dogs trained for drug detection). The fact that they already constitute an operational system that includes many capabilities that are adapted to specific domains can really facilitate their deployment in complex environments. In this case, we would only need to enhance or extend specific sensing or actuation capabilities and, more importantly, the control and communications structure with them, in order to be able to have a “living-robot” (L-robot) ready to perform a particular task.
Most of us have already seen the NASA robots “living” in mars, that is to say, existing nearly fully autonomously away from the earth with remote control capabilities, and very advance analytical devices and tools: mass spectrometry (MS), gas chromatography (GC), High Performance Liquid Chromatography (HPLC).We may then envisage that having long lasting outdoor robots, whether H-robots, S-robots or L-robots, as human-independent cyber-creatures, constitutes the basis of an intensive enlargement of human experience in rough-toxic environments for humans; a new expertise that may be fed into actual human decision making through artificial intelligence tools.
Synergy in Humans-Nature interaction may be destructive: are we humans necessarily compelled to live out of nature?
From the beginning of the development of society, we humans have tried to distort the environment converting it into stable and comfortable surroundings according to human requirements and preferences. Especially in tough environments, we humans have tended to build and reconstruct what are called anthropic spaces.
From a human perspective, the beauty of such places is outstanding. In them the territory shows a marked combination of patch-work-like structures: olive trees in rustic hilly places, i.e. rustic lands with large amounts of solar radiation reserved for vineyards, the fertile sedimentary humid soils for extensive crops, while areas close to homes are dedicated to intensive crops like fruit and vegetables.
Romans considered a “Quinta” (around 20ha) the smallest self-sufficient agricultural unit, while in large areas in Iberian Peninsula we keep finding “Heredades” (around 1000ha) where we also see that large outdoor extensive livestock (sheep, goats, pigs, cows and bulls) are bred taking into account the carrying capacity of the ecosystem. Such a structure is feasible only in cases where population is scarce and under the control of few people, namely the “páterfamilia”. In fact the term family referred to the pool of slaves including the wife and offspring, for whom under the Roman law the “páterfamilia” would have the right of life and death. In contrast the roman cities were population dense, with highly specialized jobs and skills, and specific education plans. May we envisage then that for us humans the role will be the tender natural look-after of complex H-S-L robots and of living organisms?
In this context, we may readily imagine a varied pool of small robotic fleets as neo-slavery that would on the one hand free humans from hard, tiring repetitive work, preserving high level thinking and creative skills for humans and for their domestic animals, avoiding the need for off-living in artificial environments out of nature.
Cyber creatures could be animals with augmented perceptions and/or contrast enhanced plant perception units
When talking about robotic fleets, we believe there is no need to avoid the presence of domestic animals, who we consider sensitive-sensible creatures with reasoning capabilities. The feasibility of mounting perception systems and recording units that would be carried by dogs, horses etc. (futuristically even bees),with the aim of gathering environmental info that would later be processed and analysed by humans has already been described (Kokins). Note that animals exhibit curiosity and sensing abilities different from those of humans, and so a new world view could be extracted from this L-robots approach.
Moreover, also plant sensitivity and reactivity is becoming progressively better understood. For instance, the ability of isolated plants infected by bugs to produce VOCs that would inform the surrounding plants has been described in crops such as maize. This is the basis of BT-GMO maize which has somehow also been discussed in terms of overexploiting a mechanism that took nature thousands of years to develop.
Gathering massive information on host-infective species or predator-prey behaviours under apparently unmodified environments will be basic to parametrize well known mathematical models that could be fed into the dynamic ecosystem with ever increasing precision in their prediction capabilities. In this sense, we would like to highlight some early works such as those from Lina Maldonado and cols (2008) who in collaboration with a pool of students proposed the concept of environment robot for the control of apple snails in rice crops.
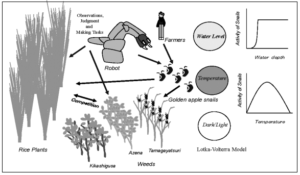
Alejandro Isabel LUNA MALDONADO, YusukeYAMAGUCHI,Midori TUDA and Kei NAKAJI, 2008 [5].
Another very interesting example can be found from Ninomiya et al. (2012) [6] with their work entitled “children as sensors” which refers to the possibility of teaching young children in very rural and uneducated areas in order to build an information network linked to remote experts with the aim of performing precision fertilization, and integrated and organic pest control.
The development of an eco-organic and sustainable strategy and derived tactics requires a deep insight of the interactions between phenotyping and genomics
Plant and animal domestication is the basis for the conversion of hunter-gatherers into farmers. The primary strategy starting either from burning small patches of forest in order to initiate crop growing, or by generating soil from rocky substrates. Arts and crafts were developed to reduce human workload and demand at the expense of the onset and evolution of high level thinking and more precise control in tasks. Consequently, farming activity previous to the industrial revolution was naturally rich in diversity of human skills and anthropic spaces that fostered the arousal of new ecological niches that were co-colonized by a diversity of plants and animals. It is readily understood and accepted that previous to the industrial revolution, anthropic spaces were richer than natural unattended surroundings.
The adoption of context adapted tactics resulted in the enormous variety of human cultural practices, which scarcely demanding in terms of energy and mandatorily sustainable. Under these circumstances we encounter strong differences among the societies according to their environmental conditions, namely temperature, wind and water availability, which in turn increased human diversity in terms of tools, shelters, houses and social buildings.
 Pieter_Bruegel_the_Elder-_The_Seasons_-_Spring.JPG
Pieter_Bruegel_the_Elder-_The_Seasons_-_Spring.JPG
Such concept, based on local tacit knowledge, was naturally incompatible with the design and manufacturing of the large massive machines and the production systems that were engineered after the world wars. They could not be used in uniform environments with little availability of human labour. As a consequence, human societies have evolved in time into a global compendium of rigid and homogeneous responses to one of the two local challenges, at the expense reducing eco-diversity and at ever increasing energy demand rate and residues.
We therefore witness the opportunity of gathering advanced analytical platforms into autonomous vehicles for the so called high through- output phenotyping of living species and varieties. This way we will be remastering a smart neo-craft innovation based on large fleets of tinny intelligent cyber creatures that will help in attaining resistant and resilient ecosystems against extreme climatic events. Such cyber creatures will potentially revolutionize the human to nature.
Avoiding the eternal confrontation scenario: science and technology, biotechnology and engineering, nature against human culture.
The integration of holistic human to AI global thinking with local adaption of advanced perception systems and bio-technologies, namely ‘omics’, means overcoming the eternal confrontation scenario: science and technology, biotechnology and engineering. In order to do so, there is the mandatory need of rebuilding the communications between distant-isolated knowledge domains. Nature should not be adapted to engineering requirements, bioengineering should be remastered according to a sustainable incorporation of dense human societies into smooth coexistence in complex ecosystems, resilient to abrupt climate changes.
We may fancy that ancient agro-forestry practices such as the typical crop enhanced Mediterranean pasture, or fish production in rice plots, will be promoted in the near future. In order to do so, robotic scouting shepherds will be built based upon aerial or ground unmanned concepts together with ubiquitous low-cost wireless sensor networks. A cornerstone of such cyber creatures will their augmented environmental sensing capabilities such as VOCs detection and quantification, or the early detection and identification of invasive species entering stable ecosystems. Control will be established by means of robotic predators that can be readily switched off.
Gildardo Efraín Palencia Calderón, director of the La Suiza Research Center, of Corpica in El Playón, after 10 years of research and designs, is promoting agroforestry systems as a new proposal for the planting of special cocoa in the country (Kaoga, 2012) [7]. One of the main advantages of the systems being the mitigation effects of such agricultural practice in a climate change scenario.

All the “omics” (proteonomics, metabonomics, metabolomics …) are to be developed into portable and non-invasive devices generating terabytes data, information and hopefully wisdom.
In a scenario of extreme climatic events and global climate change, the time has arrived for massive and intense search of generic characters that would help in resisting and mitigating its effects. Nowadays, this activity takes place in the so called High Through-put Phenotyping (HTPT) field of knowledge. However, a major handicap in this particular challenge isto has as many characters to be phenotyped as loci are identified in the genome.
Lately we are witnessing the onset of advanced transcriptomic technologies, the so called “omics” together with new and less risky (apparently) genomic edition CRISPR technology: a simple yet powerful tool for editing genomes that allows researchers to easily alter DNA sequences (https://www.livescience.com/58790-crispr-explained.html) and modify gene function; according to references
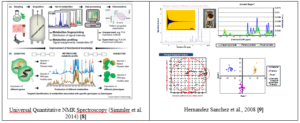
Let us then propose a S or L robot that would either take georeferenced samples that would be biotechnologically engineered afterwards in the lab, or either analysed in situ with advanced portable analytical systems as MS, GC, HPLC or even H-NMR-MAS spectrometry among others.
The design, implementation and onset of organic treatments should take advantage of natural examples without their over-exploitation or ruining millenniums of evolution.
We have already mentioned the case of corn borer bug and its control by means of BT GMO. This is just one of many cases. Since humans started farming they have been challenged by a number of pests, but the most important ones are the lepidopteran larvae (i.e., caterpillars) that are stalk borers, ear or leaf feeders, and the coleopteran larvae (i.e., beetle grubs) that feed on roots. According to Helmich, 2012 [10], in 1996, USA growers were introduced to commercial maize that was genetically engineered (GE) with resistance to the European corn borer and other lepidopteran maize pests. In 2003 another GE maize was introduced that killed corn rootworm larvae (beetle grubs), specially larvae of the western corn rootworm, Diabroticavirgifera, another “billion dollar bug” (Figure 2). These GE plants produce crystal (Cry) proteins or toxins derived from the soil bacterium, Bacillus thuringiensis (Bt), hence the common name “Bt maize”. Bt maize has revolutionized pest control in a number of countries, but there are still concerns about its use and impact.
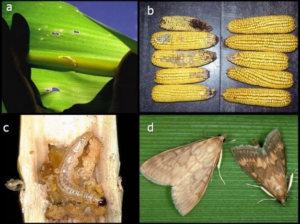 Helmich, 2012 [10]
Helmich, 2012 [10]
A very interesting reference for engineers, with the aim of developing an interdisciplinary definition of environmental robots and cyber creatures, is the book a taste for the beautiful Michael J. Ryan (2018) where many examples are provided in terms of biological behaviours that may be incorporated gradually to our environmental cyber creatures.
Humans should learn not to be a plague in nature, evolving from epidemic action to symbiotic natural behaviour, practicing a holistic soft-smooth-self-control of all cyber biological species.
Through history, the human race has faced large variations in population growth rates that have also led to very relevant numbers of displaced people, in some cases, that could have been considered climate refugee.
Some references, point out the interrelationship between pests/plagues and human migrations McNeill, 1984 [11] or Diamond (2015) [12], as well as the relationship between the soundness of the environment and the derived quality and complexity of human culture described by the former author MacNeill, 1984 [11]. Also some broadcast historical essays such as those of Max Weber (1896) [13], or Jared Diamond (2005) [14] clearly indicate the existence of society collapse as a more determinant factor than war itself.
In this context we may consider humans to mute from gregarious to isolated behaviour in a similar way as some insects do, i.e. the marabout. In order to live without large global environmental conflicts, we humans need in fact to deal with an understanding on the dynamics of resources, the carrying capacity of ecosystems, as well as to face a precise prediction of extreme events to come.
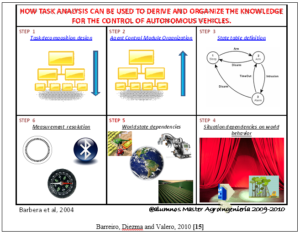
Therefore an understanding of human and robotic task analysis, or the type of vehicles required (ground or aerial) is on the base of a proper delimitation of the behaviour of cyber creatures.
The concept of invariance for cyber-agro biological ecosystem remains to be developed, i.e. incorporating the point of view of theoretical physicists into biological systems.
According to theoretical physics, invariance is the property of remaining unchanged regardless of changes in the conditions of measurement, i.e. the area of a surface remains unchanged even if the surface is rotated in space; thus the area exhibits rotational invariance. In physics, invariance is related to conservation laws.
In this context we could hypothesize about having our cyber creatures as icosahedra creations or even avatars, where each knowledge domain would be represented, characterized and modelled, and in terms of interactions and dynamic modelling with the rest of the polyhedron faces. In such a way, the experts could rotate the avatar in order to understand the interactions and implications of their own suggestions in the conceptual creation of the environmental cyber creatures.

The area is one of the primary invariants in geometry (Sinitsky et al., 2016) [16]
Let us end with a Gödel-style joke on the “incompleteness theorems” (Sinitsky et al., 2016) [16-22]
- Theorem 1: For any person, there exists a mathematical proposition that is unprovable by that person.
- Theorem 2: For any statement, there exists a person who can’t prove this statement.
Conclusion
The first statement as an outcome of this paper states that perception and not action is in the core of environmental intelligent robotics that is, using simple-sensors technology with innovative built-in capabilities for mimicking the perception of complex living organisms, in order to achieve a better understanding of daily underlying reality.
Another important conclusion in this prospection is profit from constructive human to nature synergies, while avoiding destructive interferences, such as harm to the environment and loss of biodiversity. In this context we propose to overcome the concepts of hard (H-) and soft (S-) robotics, and let the new concept of living (L-) robotics come into the front stage.
A third conclusion that we want to underline is to let the H-S-L-robotics be a cornerstone tactic within a holistic eco-organic sustainable strategy, avoiding the eternal confrontation scenario: science versus technology, biotechnology versus engineering, nature against human culture.
A nice starting point for the foreseen scenario would be turning all advanced analytical platforms (MS, HPLC, NMR-MAS) into portable devices within a reasonable payload, under a cost-efficiency point of view, and a detailed life-cycle analysis.
Finally, we conclude that in order to avoid humans being a plague in nature, we need to evolve from epidemic action to symbiotic natural behaviour, and we understand that this can be confronted by incorporating the basics of theoretical physicists into biological systems and vice versa.
References
- Suh SC, Carbone JN, Eroglu AE (2014) Applied Cyber-Physical Systems. Springer: New York, Heidelberg, Dordrecht & London, 1-3.
- Rad CR, Hancu O, Takacs IA, Olteanu G (2015) Smart monitoring of potato crop: a cyber-physical system architecture model in the field of precision agriculture. Agriculture and AgriculturalScienceProcedia6: 73-79.
- Matellán V (2008) “Multi-agent versus multi-robot and other Byzantine discussions.” Journal of Physical Agents 2: 1-4.
- Chen PJ, Stewart F, Arikawa K. “THeMoRe, THeBeTTeR? A BuTTeRflYwITH 15 KIndS of lIgHTSenSoRSIn ITS eYe.” Age 13: 14.
- Maldonado AIL, Yamaguchi Y, Tuda M, Nakaji K (2008) “Development of an Intelligent Robot for an Agricultural Production Ecosystem (III)–Modeling of the Predation of Rice Plants and Weeds by Golden Apple Snail–.” J. Fac. Agr., Kyushu Univ 53: 517-521.
- Ninomiya S, Mori Y, Takasaki T, Okano Y, Kameoka T, et al. (2012) Children as field sensors-a trial in Vietnam. In Workshop on applications of smart sensors and wireless sensor networks. International Conference of Agricultural Engineering-CIGR-AgEng 2012: Agriculture and Engineering for a Healthier Life, Valencia, Spain, 8-12 July 2012. CIGR-EurAgEng.
- Hellmich R L, Hellmich K A (2012) Use and Impact of Bt Maize. Nature Education Knowledge 3(10):4
- Simmler C, Napolitano J, McAlpine JB, Chen SN, Guido FPauli G (2014) “Universal quantitative NMR analysis of complex natural samples.” Current opinion in biotechnology 25: 51-59.
- Hernández-Sánchez N, Barreiro P, León L, Ruiz-Cabello J (2008) “Modeling for metabonomic fingerprint assignment in olive fruits.” Actahorticulturae” 802: 393-400.
- Hellmich RL, Hellmich K A (2012) Use and impact of Bt maize. Nature Education Knowledge, 3(10), 4.
- McNeill W (1984) Plagas y pueblos. España. Siglo XXI.
- Diamond J (2015) Guns, Germs, and Steel.
- Max Weber (1896) Die sozialenGründe des Untergangs der antikenKultur
- Diamond J (2005) Collapse: How societies choose to fail or succeed. Penguin.
- Elorza B, Ubierna V, Pilar (2010) “Aplicación de las técnicas de aprendizaje colaborativo en el grado de ingeniero agrónomo (agricultura de precisión) y máster de Agroingeniería (robótica aplicada).” VIII jornadas sobre la actividad docente e investigadora en ingeniería agroforestal. Sevilla 22-24.
- Sinitsky, Ilany (2016) Change and Invariance: A Textbook on Algebraic Insight Into Numbers and Shapes. Brill Sense.
- Richard L. Hellmich (USDA–ARS, Corn Insects and Crop Genetics Research Unit, and Dept of Entomology, Iowa State Univ, IA) & Kristina AllyseHellmich (Dept. of Biology, Grinnell College, IA) © 2012 Nature Education Use and Impact of Bt Maize
- Lumbreras A, Teresa, Morente B, Alejandro, Elorza B, et al. (2011) Sistemas agroforestales ¿pasado o futuro?. En: “IV Congreso de Estudiantes Universitarios de Ciencia, Tecnología e Ingeniería Agronómica”, 10/05/2011 – 11/05/2011, Madrid, España.
- Gawrylewski, Andrea, Yasemin S (2018) “A Taste for the Beautiful: The Evolution of Attraction.” Scientific American 318: 66-66.
- Tony B, Albus J, Messina E, Schlenoff C, Horst J (2004) “How task analysis can be used to derive and organize the knowledge for the control of autonomous vehicles.” Robotics and Autonomous Systems 49: 67-78.
- Kokins (2016) 10.17770/het2016.20.3543
- Casanova-Lugo F, Ramírez-Avilés L, Parsons D, Caamal-Maldonado A, Piñeiro-Vázquez AT, et al. (2016) Environmental Services From tropical agroforestry systems. Revista Chapingo. Serie Ciencias Forestales y del Ambiente 22; 269-284.